03. System Architecture
Fixed Wing Control Architecture
Fixed wing control is not quite the same thing as quadrotor control. When you imagine quadrotor control you can think of some continuous trajectory through space, where the controller's job is to keep the vehicle as close to that trajectory as possible.
In fixed wing flight we generally try to keep the vehicle in a trim state (or close to one). This means the job of the controller is slightly different. Instead of following a continuous trajectory through space, we want to navigate through a sequence of trim states.
The trim states we care about will generally have a commanded airspeed V_c, altitude z_c, heading \chi_c, and sideslip angle \beta_c (though this will almost always be equal to zero).
The job of the controller (which we can also call the autopilot) is to generate the appropriate thrust and control surface deflections for the associated trim state.
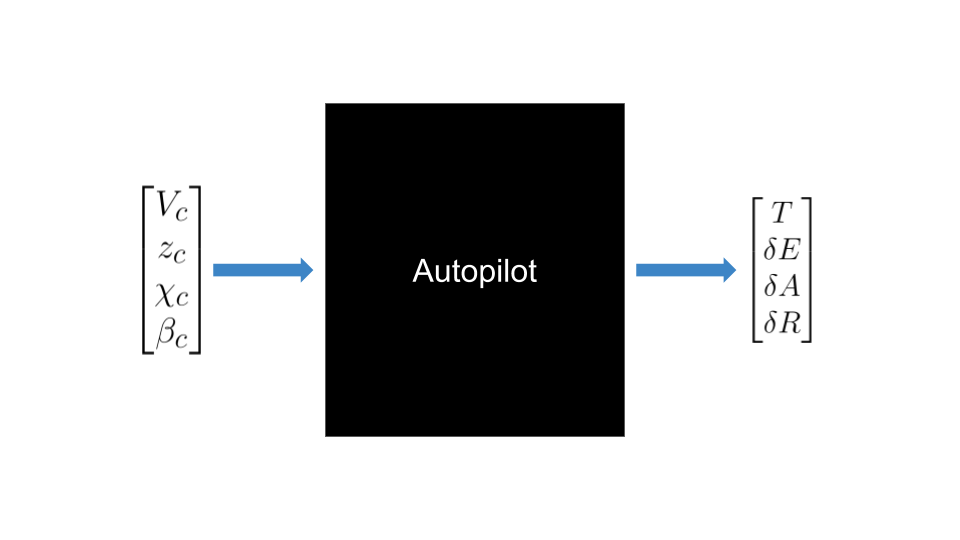
Highest level control diagram for fixed wing autopilot.
Longitudinal and Lateral-directional Autopilots
As you've seen in the last few lessons, we can break the dynamics of fixed wing flight into two smaller problems: longitudinal motion and lateral-directional motion. This allows us to break our control problem into two smaller problems as well.
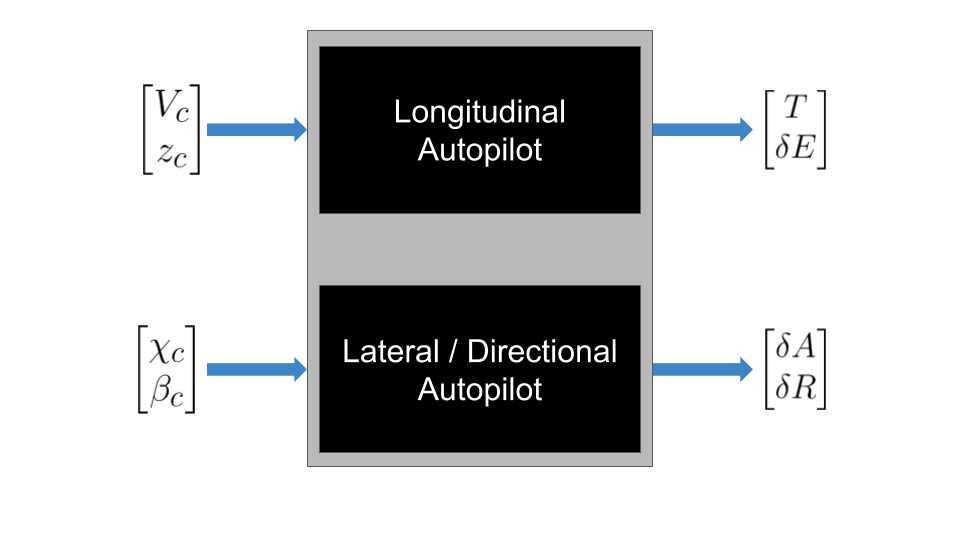
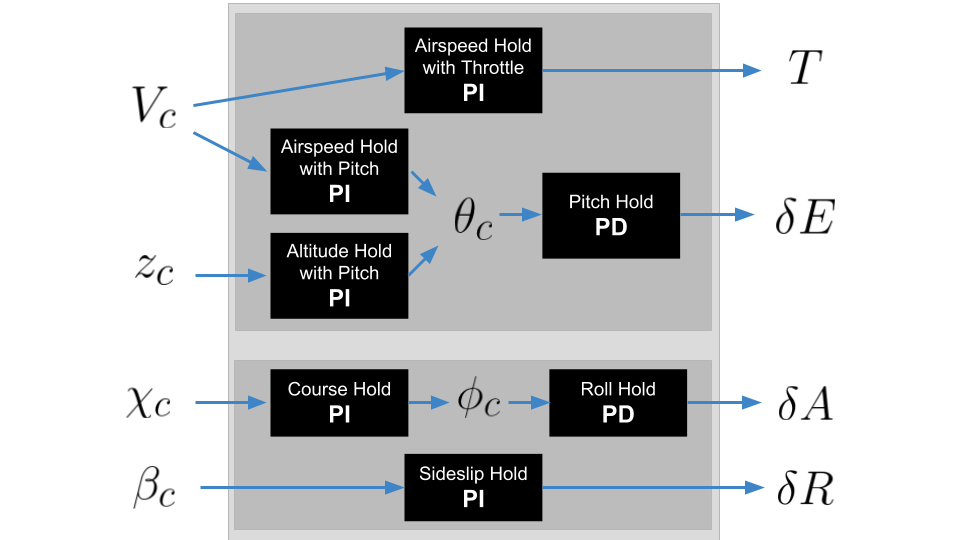
We'll be discussing this diagram more in the rest of this lesson. Ultimately, the control diagram that we use will look something like this:
Reminder: Cascaded Control
Sometimes we use a controllable quantity to directly influence a commanded quantity. For example, the bottom control loop in the diagram above uses the rudder deflection \delta R to directly control the sideslip \beta_c.
But sometimes we need to use some intermediate quantity. This is called "cascaded control". For example, we use the roll angle \phi as an intermediate variable to relate the aileron deflection \delta A to the commanded heading \chi_c. This means we need to use two nested control loops!
If you want an additional refresher on cascaded control, go back to the video called Intro to Cascaded Control from the module on quadrotor control.
Reminder: Fixed Wing Cheat Sheet
You can find all of the equations for this module in the Fixed Wing Cheat Sheet.